📡 Arduino Mega
tip
File link: https://github.com/GreenCrateSG/pcb
Overview
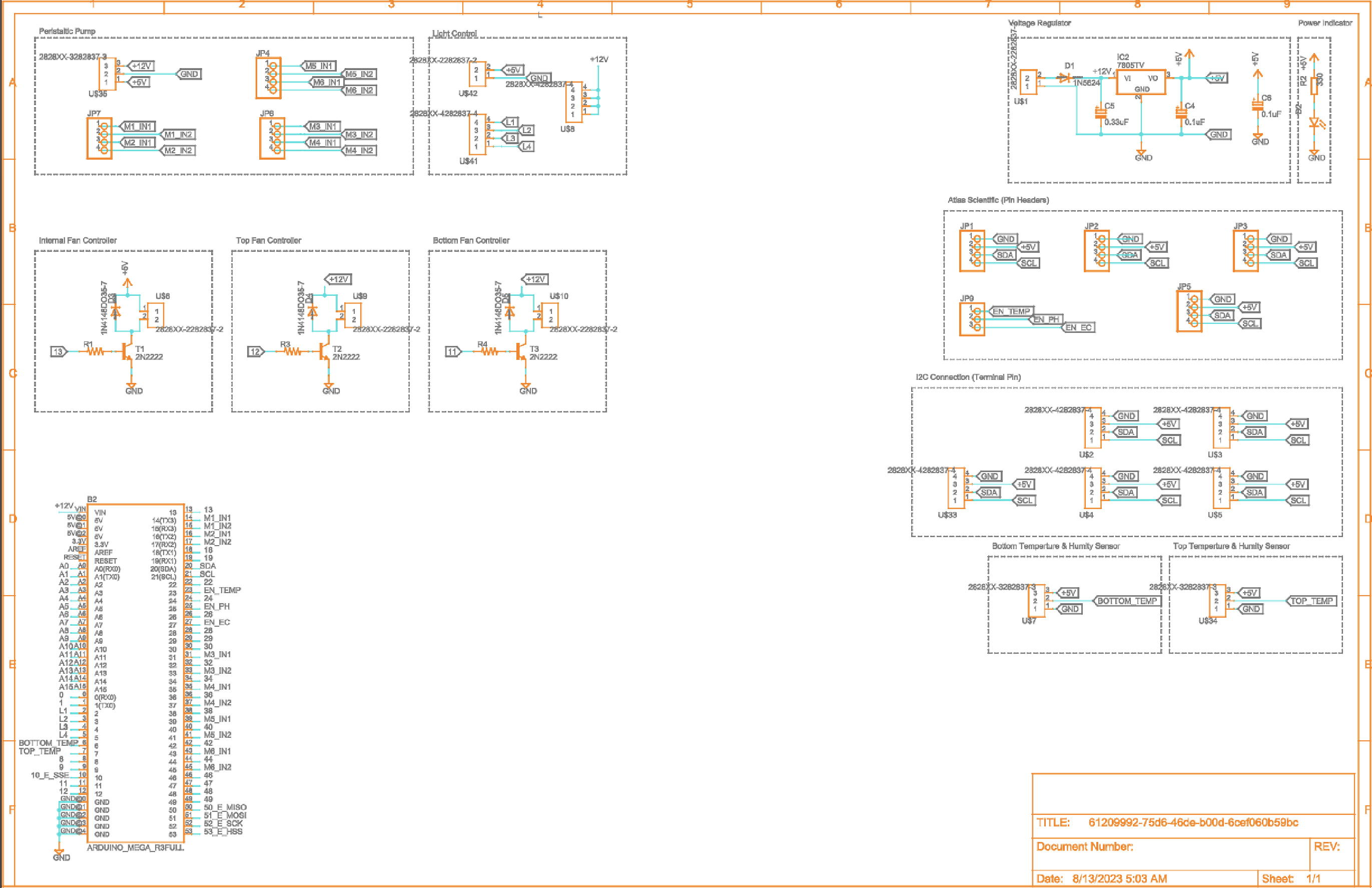
Printed Circuit Board Design
 design by Ajay Shanker
design by Ajay Shanker
- LED Light (Power indicator) - Safety feature to indicate that the PCB is powered on.
- Linear Voltage Regulator - 12V DC power supply from a switching power is converted to 5V DC. The 5V DC is then used to power the Arduino Mega and the 12V DC is used to power the Fan.
- Perisatic Pump - The pump is used to pump the nutrient solution from the reservoir to the grow bed.
- 5V Fan Controller - The fan is used to cool the internal junction box.
- 12V Fan Controller - The fans are used to have controlled environment for the plants.
- Arduino Mega - The Arduino Mega is the main microcontroller that controls the entire system.
- 4 Channel Relay - The relay is used to control the 12V Grow Lights.
- DHT11 Temperature & Humdidty - The sensor is used to measure the temperature and humidity of the environment. (One Wire Protocol)
- TSL2591 Lux Sensor - The sensor is used to measure the light intensity of the environment. (I2C Protocol)
- Atlas Scientific Sensor - The sensor is used to measure the pH, EC and temperature of the reservoir. (I2C Protocol)
- DFRduino Ethernet W5100S - The ethernet shield is used to connect to MQTT Broker. (SPI Protocol)
Code Design
tip
File link: https://github.com/GreenCrateSG/iot
MQTT API
Broken down to 3 main topics:
cmnd: command mode (e.g. on grow lights)
stat: status mode (e.g. check if the altas scientific sensor is working)
tele: telemetry mode (e.g. what is the current temperature of the environment)
/** Topic **/
#define TOPIC_API "arduino/#" // <- any topic related to arduino
#define TOPIC_CMND "cmnd" // command
#define TOPIC_STAT "stat" // status
#define TOPIC_TELE "tele" // telemetry
#define DHTTOP_TEMP_TOPIC "sensor/dhttop/temperature"
#define DHTTOP_HUM_TOPIC "sensor/dhttop/humidity"
#define DHTBOT_TEMP_TOPIC "sensor/dhtbot/temperature"
#define DHTBOT_HUM_TOPIC "sensor/dhtbot/humidity"
#define LUXTOP_TOPIC "sensor/luxtop"
#define LUXBOT_TOPIC "sensor/luxbot"
#define PH_TOPIC "sensor/ph"
#define EC_TOPIC "sensor/ec"
#define TEMP_TOPIC "sensor/temp"
#define POWER_TOPIC "sensor/power"
#define LOADVOLTAGE_TOPIC "sensor/loadvoltage"
#define CURRENT_TOPIC "sensor/current"
#define PH_TARGET_TOPIC "set/ph_target"
#define EC_TARGET_TOPIC "set/ec_target"
#define PH_SET_UPPER "set/ph_upper"
#define PH_SET_LOWER "set/ph_lower"
#define EC_SET_THRESHOLD "set/ec_threshold"
#define PUMP_SET_TOPIC "set/pump"
#define LIGHT_ONE_SET_TOPIC "set/light_one"
#define LIGHT_TWO_SET_TOPIC "set/light_two"
#define MOTOR_A_SET_TOPIC "set/motor_a"
#define MOTOR_B_SET_TOPIC "set/motor_b"
#define AUTO_NUTRITION_DOSE "auto_nutrition_dose"
/****/
MQTT Callback
String _str;
/**
* @brief Callback for command
* @param subtopic Subtopic
* @param hydro Class Hydro
*/
void command_callback(String& subtopic, String& payload, Hydro& hydro) {
D_println("[MQTT]: command");
_str = String(); // clear string
_str += subtopic;
_str += "/";
_str += TOPIC_CMND;
if (subtopic == PH_TARGET_TOPIC)
hydro.set_ph_target(payload.toFloat());
else if (subtopic == EC_TARGET_TOPIC)
hydro.set_ec_target(payload.toFloat());
else if (subtopic == PH_SET_UPPER)
hydro.set_ph_upper_threshold(payload.toFloat());
else if (subtopic == PH_SET_LOWER)
hydro.set_ph_lower_threshold(payload.toFloat());
else if (subtopic == EC_SET_THRESHOLD)
hydro.set_ec_threshold(payload.toFloat());
else if (subtopic == PUMP_SET_TOPIC) {
if (payload == "true")
hydro.set_pump(true);
else
hydro.set_pump(false);
} else if (subtopic == LIGHT_ONE_SET_TOPIC) {
if (payload == "true")
hydro.set_light_one(true);
else
hydro.set_light_one(false);
} else if (subtopic == LIGHT_TWO_SET_TOPIC) {
if (payload == "true")
hydro.set_light_two(true);
else
hydro.set_light_two(false);
} else if (subtopic == MOTOR_A_SET_TOPIC) {
if (payload == "true")
hydro.set_solution_a_motor(true);
else
hydro.set_solution_a_motor(false);
} else if (subtopic == MOTOR_B_SET_TOPIC) {
if (payload == "true")
hydro.set_solution_b_motor(true);
else
hydro.set_solution_b_motor(false);
} else
mqtt_publish(_str.c_str(), "Error");
}
/**
* @brief Callback for telemetry
* @param subtopic Subtopic
* @param hydro Class Hydro
*/
void telemetry_callback(String& subtopic, String& payload, Hydro& hydro) {
D_println("[MQTT]: telemetry");
_str = String(); // clear string
_str += subtopic;
_str += "/";
_str += TOPIC_TELE;
if (subtopic == DHTTOP_TEMP_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.top_sensors.get_temp()).c_str());
else if (subtopic == DHTTOP_HUM_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.top_sensors.get_hum()).c_str());
else if (subtopic == DHTBOT_TEMP_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.bottom_sensors.get_temp()).c_str());
else if (subtopic == DHTBOT_HUM_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.bottom_sensors.get_hum()).c_str());
else if (subtopic == LUXTOP_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.top_sensors.get_lux()).c_str());
else if (subtopic == LUXBOT_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.bottom_sensors.get_lux()).c_str());
else if (subtopic == PH_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.reservoir.get_ph()).c_str());
else if (subtopic == EC_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.reservoir.get_ec()).c_str());
else if (subtopic == TEMP_TOPIC)
mqtt_publish(_str.c_str(), String(hydro.reservoir.get_temp()).c_str());
else
mqtt_publish(_str.c_str(), "Error");
}
/**
* @brief Callback for status
* @param subtopic Subtopic
* @param hydro Class Hydro
*/
void status_callback(String& subtopic, String& payload, Hydro& hydro) {
D_println("[MQTT]: status");
_str = String(); // clear string
_str += subtopic;
_str += "/";
_str += TOPIC_STAT;
if (subtopic == AUTO_NUTRITION_DOSE)
if (hydro.reservoir.get_ec() < hydro.get_ec_threshold())
mqtt_publish(_str.c_str(), "true");
else
mqtt_publish(_str.c_str(), "false");
else
mqtt_publish(subtopic.c_str(), "OK");
}
Sensors Class
/**
* @brief Class Set of Sensor
*
*/
class Sensors {
private:
float temp = 0.0;
float hum = 0.0;
int lux = 0;
public:
// init
Sensors() {
set_temp(0.0);
set_hum(0.0);
set_lux(0);
}
Sensors(float _temp, float _hum, int _lux) {
set_temp(_temp);
set_hum(_hum);
set_lux(_lux);
}
~Sensors() {}
float get_temp() { return temp; };
float get_hum() { return hum; };
uint16_t get_lux() { return lux; }
State set_temp(float _val);
State set_hum(float _val);
State set_temp_hum(float _temp, float _hum);
State set_lux(int _lux);
State serial_print();
};
Reservoir Class
/**
* @brief Class Set of Reservoir
*
*/
class Reservoir {
private:
float temp = 0.0;
float ph = 0.0;
float ec = 0.0;
public:
// init
Reservoir() {
set_temp(0.0);
set_ph(0.0);
set_ec(0.0);
}
Reservoir(float _temp, float _ph, float _ec) {
set_temp(_temp);
set_ph(_ph);
set_ec(_ec);
}
~Reservoir() {}
float get_temp() { return temp; }
float get_ph() { return ph; }
float get_ec() { return ec; }
State set_temp(float _temp);
State set_ph(float _ph);
State set_ec(float _ec);
State set_all(float _temp, float _ph, float _ec);
State serial_print();
};
Junction Box Class
// Main Class
class Hydro {
private:
// Dosing thresholds
float ph_upper_threshold = 6.5; // Upper pH threshold for pH adjustment
float ph_lower_threshold = 6.0; // Lower pH threshold for pH adjustment
float ec_threshold = 2.0; // EC threshold for nutrient dosing
// Target values
float ec_target = 2.4; // Target EC value
float ph_target = 6.2; // Target pH value
float reservoir_volume = 135000 * 0.5; // volume of reservoir (ml)
float flowrate_perastatic_pump = 45; // ml/min
float nutrition_concentration = 200; // 5ml per 1000ml
float amount_of_nutrition_needed = reservoir_volume / nutrition_concentration;
public:
Hydro() {}
Hydro(float _ph_upper_threshold, float _ph_lower_threshold, float _ec_threshold, float _ec_target, float _ph_target) {
set_ph_upper_threshold(_ph_upper_threshold);
set_ph_lower_threshold(_ph_lower_threshold);
set_ec_threshold(_ec_threshold);
set_ec_target(_ec_target);
set_ph_target(_ph_target);
}
~Hydro() {}
// bool light_one = false; // Germination
// bool light_two = false; // Germination
Sensors top_sensors = Sensors();
Sensors bottom_sensors = Sensors();
Reservoir reservoir = Reservoir();
State auto_nutrition_dose(); // todo
// Getters
float get_ph_upper_threshold() { return ph_upper_threshold; }
float get_ph_lower_threshold() { return ph_lower_threshold; }
float get_ec_threshold() { return ec_threshold; }
float get_ec_target() { return ec_target; }
float get_ph_target() { return ph_target; }
// Setters
State set_ph_upper_threshold(float _val);
State set_ph_lower_threshold(float _val);
State set_ec_threshold(float _val);
State set_ec_target(float _val);
State set_ph_target(float _val);
void set_pump(bool _val);
void set_light_one(bool _val);
void set_light_two(bool _val);
void set_solution_a_motor(bool _val);
void set_solution_b_motor(bool _val);
State print();
};